







Current Features:
- - 22 + default RC Vehicles (Cars, Trucks, Crawlers, Boats, Quadcopters and Planes etc)
- - Simple in game Track/Map editor with one click upload to Steam Workshop to share your creation with the world.
- - Single player or up to 10 vehicle Multiplayer
- - 8 Camera Views Per Track/ Facility including FPV animated mode, Driverstand, Onboard, Follow, Rotate and Blimp Cams
- - Live animated Track marshals and Camera men with Ragdoll Physics
- - Drive from anywhere you want.
- - Walk the track in FPV Mode and explore anywhere in the game. You can even go for a swim.

Controllers:
Any controller can be used with RCSIM. Keyboard, XBOX360 for PC, PS3, Steam Controllers etc. Though most prefer using a real rc radio via USB-PC (Not available for Linux or Mac as of 7-18-15) adapter. These are readily available for todays real rc transmitters. This is the best way to drive RC SIM 2.0. You will not only have the most control on these super fast machines but will gain the most from practicing with the same remote as you use in real life. Adapters for almost all of today's RC transmitters can be found with a simple google search. Just google “transmitter to USB” or "USB RC Transmitter adapter”.

Current Surface Vehicles:
- – 1/10th Scale Buggy 2WD
- – 1/10th Scale Buggy 4WD
- – 1/8th Scale Buggy 4WD
- – 1/10th Scale Stadium Truck 2WD
- – 1/10th Scale Short Course 2WD
- – 1/10th Scale Short Course 4WD
- – 1/10th Scale Rock Crawler 4WD with Moveable camera and Paintball Marker
- – 1/10th Scale Squatch Rock Crawler
- – 1/10th Scale 4-Link Monster Truck
- – 1/10th Scale Touring Car AWD
- – 1/10th Scale Drift Car
- – 1/10th Scale Semi Truck with Trailer
- – Mini Quad 250 mm
- – Mini Quad 265 mm
- – Med Quad 310 mm
- – Med Quad 385 mm with Movable Camera and Paintball marker
- – PiperKub 40 Trainer Plane
- – JumboJet 110 Brushless Ducted Fan Plane
- – 28″ Wakeboat with Movable Camera and Paintball Marker
- – 36″ Outrigger Race Boat
- – 42″ Catamaran Race Boat
- – 46″ Deep Vee Race Boat

Track/Map Creator:
- - Simple yet Powerful in game Track/Map editor with one click upload to Steam Workshop to share your creation with the world.
🕹️ Partial Controller Support
- RC Simulation 2.0 Content LINUX [1.33 G]
May 12th Update:
- Acro Mode (Acrobatic) for ALL Quadcopters.
- All New boat physics.
- New Track Objects
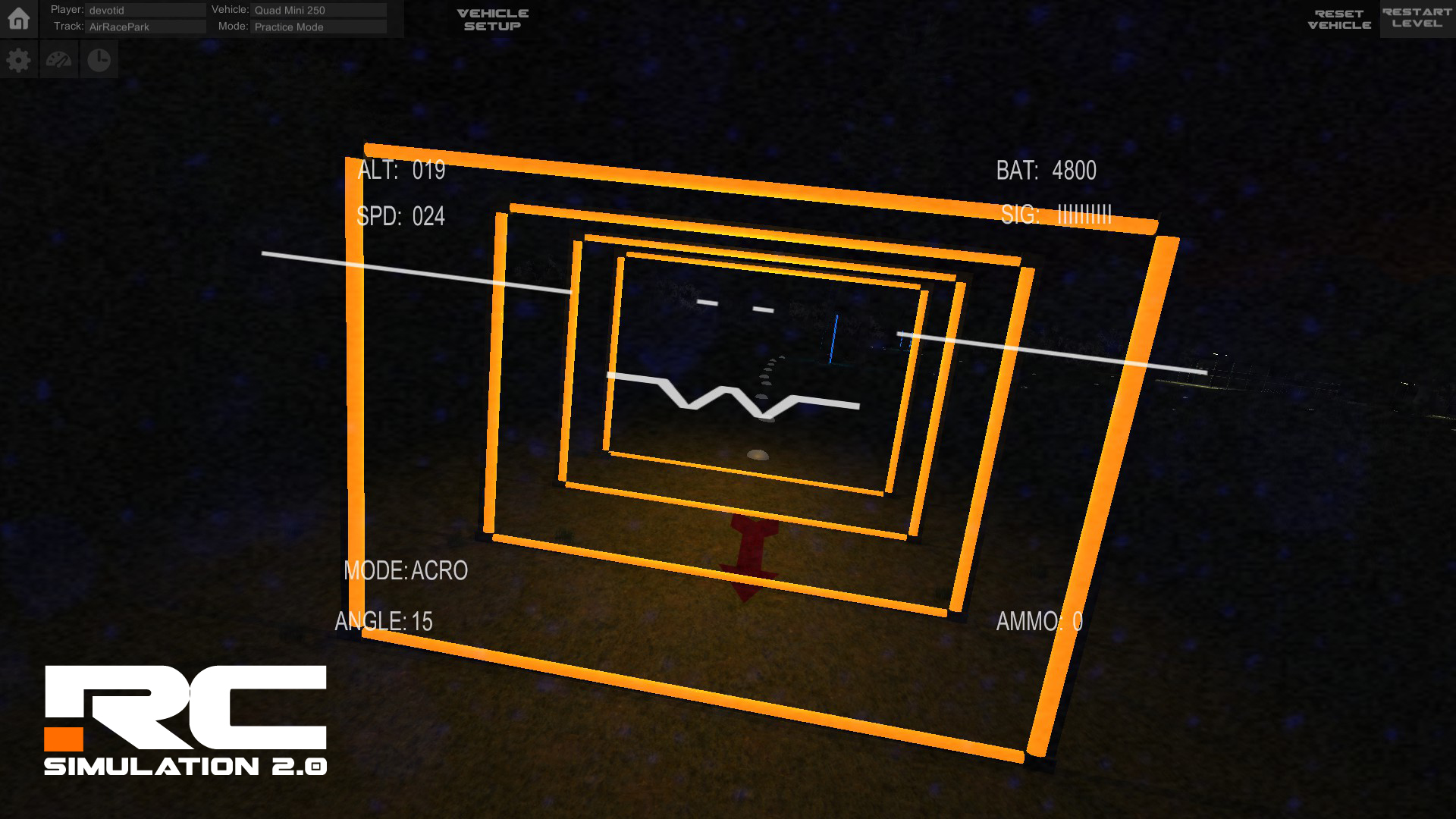
- New onboard Flying HUD
- Optimizations
- New assignable "Reset Car" button
I stink at flying....lol.
https://www.youtube.com/watch?v=NTfZrdVq5qM
NEW QUADCOPTERS:
Lately, I have been studying and learning all I can about the drone racing industry. You can def say I have "caught the bug". I have really enjoyed building these new drones. Im not much good at piloting these yet as you can see from the attached sample video but i am really having fun pretending and breaking them. :)
The initial version of drones were just a simple approach which made them pretty easy to fly. These new drones can be tough to fly if you are new to them. The new Acro mode will allow all the real life tricks and maneuvers you can think of. Immelmann turns, flips, S-turns etc. (This is explained more in the update notes below).
All Quadcopters now hover at center stick throttle. To land and to decend you must pull the stick down but be careful not to land too hard and break something. You can adjust the Yaw, Roll and Pitch rates in the setup menu now and they will save automatically. For acro mode, there is also three easy presets to set them to slow, med and fast.
If the Acro mode drones are not your thing, you can always fall back to the "Gyro" version (in the quadcopter setup panel). This version is more like the original quads and will fly the quad in relation to the stick position of the controller. (just let off the sticks and the unit will return to hover). The Yaw axis will also rotate the drone in relation to the ground and not the copter itself. This is good for filming and general cruising. You can set the max angle of Roll and Pitch in the setup menu as well.
Seeing that the most popular way to fly the drones is Onboard FPV camera (F4 key), dont forget to adjust your camera angle (4,8,6 and 2 Number Pad keys on the keyboard) to make flying "forward" a little easier. This will be auto saved for each quadcopter. You can see the camera angle on the bottom left of the onscreen hud.

NEW BOATS:
The new boat bouyancy model should run a little faster and be more precise. With the new changes, you have to watch your throttle finger a little or the front end of the boat may bounce and even come up too far. This will force you to get out of the throttle and lose time. I also fixed the silly "ghost turning" when landing (sorry about that...:). The wake no longer dissapears when you leave the water. They all feature new adjusted Motor and water sounds. The rotate cam, when underwater will now have the same effects as the onboard cam.
I also added a New Battleship 64 to annoy larry and other users with. Its big, slow and has a Paintball gun on the front to shoot down those pesky drones with. Make sure to try it out in F4 onboard cam and then use the camera aim to throw some paintballs!

UPDATE NOTES:
- Optimized most of the vehicle physics and particle systems and have seen about a 10-15% increase in FPS on all levels tested.
- Added a "Reset/Fix Vehicle" assignable Button/Key that you can now map to any Key or button. This is easier than reaching for the keyboard all the time to fix a quad or any other vehicle. As Larry DOES NOT FIX Vehicles, he only flips them over for now. The new action is under the ROAMING catagory in the controller mapping screen. The default Key is R on the keyboard. This will fix a broken car and also sets you back to the original spawn spot when the Level was loaded.
- New Boats physics: I rewrote about 80 percent of all the boat physics. I fixed the Boat "insta" steering bug after a large bump or jump over a land area.
- Added a new fun BattleShip 64 to go float around and harass Larry. It has a paintball gun mounted in place of one of the Gun turrets. Its not the fastest and doesnt turn all that well but did I mention it has a paintball gun on the front?
- Fixed the rear rudder on the catamaran boat that was on the wrong pivot.
- Fixed the missing boat water reflections and refractions on the water surface.
- Fixed the audio for the boats and adjusted all 3D sound settings for a much better 3D "feel".
- Fixed the dissaperaing wakes when the boats would leave the water.
- Quadcopters now have new physics and two different flying modes to choose from. Gyro mode and Acro mode. The defualt is the acro mode. The acro mode is completely new and the gryo mode is a tweaked version of the first version of quadcopters. I wanted to focus first on the acro mode for the advanced flyers. (And secretly I wanted to get better at acro mode flying) ;) I will be redoing the gyro mode in the future.
- Gryo mode: The quadcopters Roll and Pitch flight is proportional to the position of the stick for now. The default setting is +- 45 degrees. The Yaw Axis will always turn releative to the Earth. (Earth Relative)
- Acro mode: The quadcopter is its most agile in this state and also the hardest to fly. You can go inverted and all that fun stuff. The Yaw axis will alway turn relative to the Quadcopter. (Object relative). This will allow for all kinds of new tricks and stunts like Immelmann Turns, loops and S turns etc....
- Added all new Quadcopter Sounds and sound controller with wind noises. It def adds to the immersion of the onboard FPV flying.
- Added a complete new flying on screen HUD for all flying vehicles. It features a simple horizon indicator allong with some on screen data like.... Altitude, Speed, Flight Mode, Ammo, Battery MAH (not yet functional) and more.
- updated 3D models for 3 of the drones. New LED Lighting and some different components.
- Added a camera viewing angle "auto save" feature for all 4 quadcopters. It will auto save when you change vehicles.
- Added a simple quadcopter setup menu that will autosave your settings for each vehicle. You can set the flight mode, Rates and turn on an axis expo if you want to smooth out the center of the axis a bit. (makes the three flying axis slightly progressive).
- Added 6 new Track Objects for the new racing quadcopters. Neon racing markers to guide the way in night racing. There is three different colors and two different shapes to start with.
Minimum Setup
- OS: SteamOS
- Processor: Intel core i5 1.6GhzMemory: 2 GB RAM
- Memory: 2 GB RAM
- Graphics: GTX 960M / Radeon HD 7xxx. 1024+ MB video card memoryNetwork: Broadband Internet connection
- Storage: 2 GB available space

[ 6358 ]
[ 5876 ]
[ 750 ]
[ 1993 ]
[ 1017 ]

Time left:
356102 days, 5 hours, 48 minutes

Time left:
356102 days, 5 hours, 48 minutes

Time left:
6 days, 13 hours, 48 minutes

Time left:
34 days, 13 hours, 48 minutes

Time left:
37 days, 13 hours, 48 minutes

Time left:
38 days, 13 hours, 48 minutes

Time left:
11 days, 23 hours, 48 minutes
Time left:
0 days, 7 hours, 48 minutes
Time left:
7 days, 7 hours, 48 minutes
Time left:
13 days, 7 hours, 48 minutes
Time left:
14 days, 7 hours, 48 minutes
Time left:
19 days, 7 hours, 48 minutes
Time left:
25 days, 7 hours, 48 minutes
Time left:
4 days, 21 hours, 3 minutes

Time left:
9 days, 13 hours, 49 minutes

Time left:
11 days, 12 hours, 49 minutes

Time left:
16 days, 19 hours, 59 minutes

































